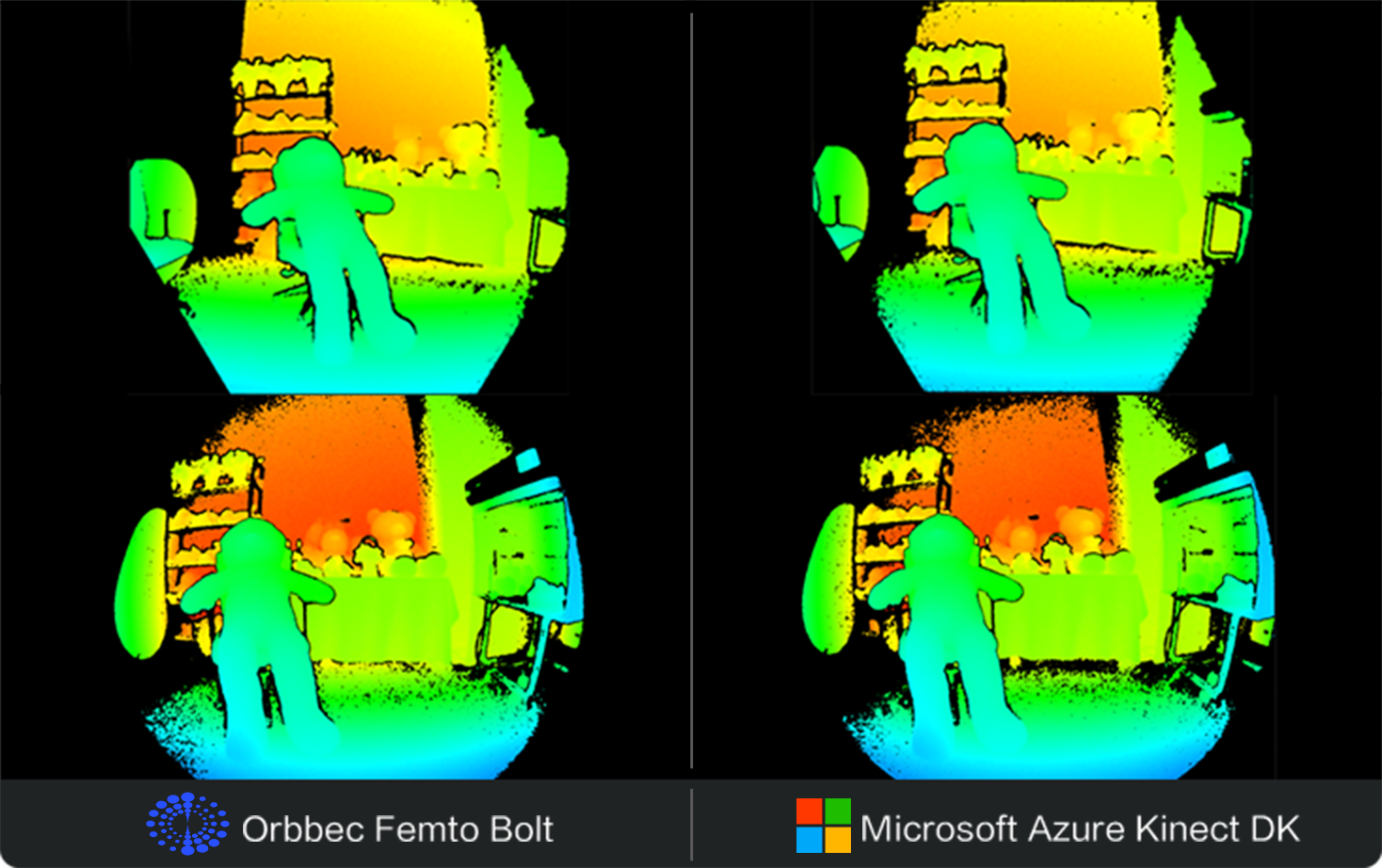
Femto Bolt 是奥比中光与微软联合打造的一款先进iToF 3D相机,作为微软官方推荐的Azure Kinect DK替代选择,Femto Bolt 深度相机采用了微软最新的先进ToF传感技术,拥有与微软Azure Kinect DK深度相机完全一致的工作模式和性能表现。
Femto Bolt 作为Azure Kinect DK 的可靠替代品,为了帮助Azure Kinect DK原有开发者更好的切换到Femto Bolt相机,我们提供:
1、与Azure Kinect Sensor SDK API接口兼容的Orbbec SDK K4A Wrapper;
2、通过Orbbec SDK K4A Wrapper可直接接入Azure Kinect body trarcking算法的Demo;
3、如何快速便捷将原有应用中的Azure Kinect DK切换至Femto Bolt的指导文档;
我们也提供了Orbbec SDK,帮助Orbbec的开发者,在使用Femto Bolt的同时,更好兼容Astra、Gemini系列相机,帮助用户充分体验奥比3D相机的强大功能,轻松完成应用开发。